Short-term Optimal Control of Water Systems using Ensemble Forecasts
Contributed by Luciano Raso
 Managing an aquifer, a reservoir, or a canal is, in water management terms, operational management. For control theory researchers, this is a control problem.
Managing an aquifer, a reservoir, or a canal is, in water management terms, operational management. For control theory researchers, this is a control problem.
Control theory is about the steering of a dynamic system. Originally applied to warfare (control of rockets and satellites), it was later extended to large plants and it is now getting the attention of the water management community.
The scheme below shows the different elements of a control problem. System performance depends on system state, which is influenced by:
- non-controllable inputs, i.e. disturbance, and
- control.
The controller, either a natural person or a mathematical algorithm, selects a control that will be applied to the system. The control decision is based on information on the system itself (feedback) and, in case, on a forecast of the disturbances.
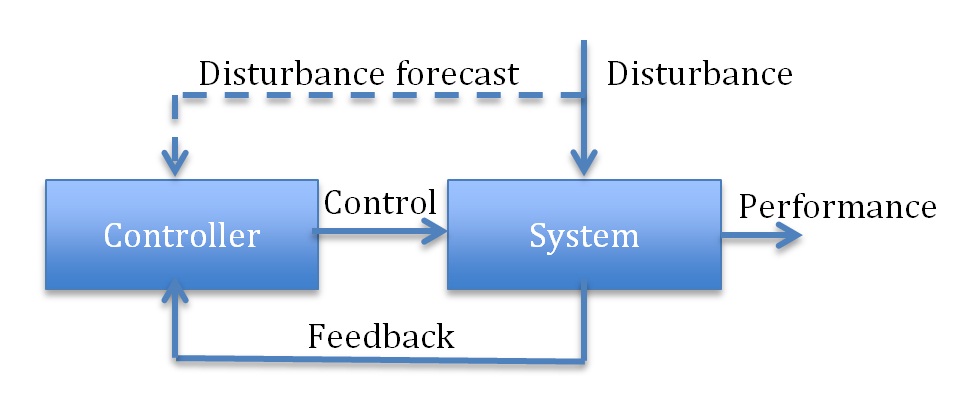
As an example: if the system is a reservoir, the disturbance is the inflow, the control is the release, and the feedback contains information on the reservoir state and hydrological condition of the catchment.
If disturbance forecasts are available, this information can also be integrated in the control policy (dashed line in the control scheme). Then, water management becomes proactive.
Proactive means that the controller sets the system to accommodate the expected disturbance even before its realization. In the reservoir example, the controller starts the release before an expected storm event in order to lower the reservoir water level and offer a buffer to reduce or avoid flood.
Model Predictive Control (MPC): what is it?
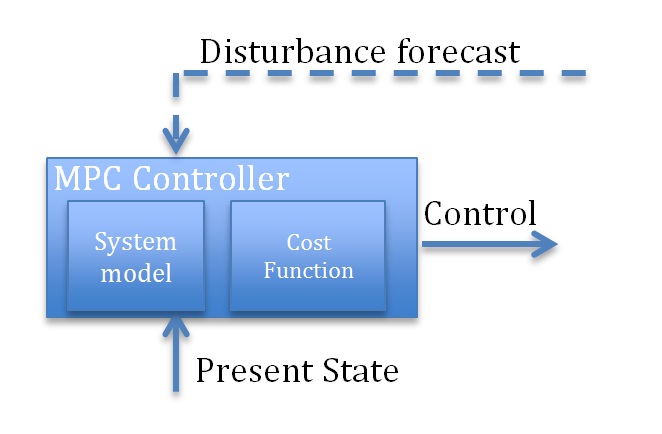
Model Predictive Control (MPC) is an advanced method for controlling complex dynamic systems. When applied to water systems operation, MPC provides proactive, integrated, and optimal management.
Its basic working principle is simple. Using a system model and an objective of the system performances, MPC finds an optimal control trajectory on a future horizon. Then, only the first control value is applied to the real system. This procedure is repeated at each control instant. The optimal control problem is solved in fact in real time.
MPC is both reactive, using feedback information, and proactive, using disturbance forecasts. In water management, MPC has been successfully applied for the short-term management of reservoirs and canals.
 How ensemble forecast can be used in MPC?
How ensemble forecast can be used in MPC?
MPC is a deterministic algorithm. Therefore, mismatches between the nominal forecast and the real one can jeopardize its robustness. With deterministic forecasts, the control is more vulnerable to forecast uncertainty, running the risk of taking action against a predicted event that eventually may not occur.
Ensemble Forecast can enhance MPC robustness in the face of forecasting uncertainty. However, ensembles cannot be used straightforward in a stochastic optimization.
The method we developed at TU Delft, called Tree-Based Model Predictive Control (TB-MPC), is an evolution of MPC that takes into account not only the present uncertainty, but its resolution in time as well. Going on in time along the control horizon, information will enter the system. Consequently, uncertainty will be reduced, and the control strategy after uncertainty reduction will change according to the occurring ensemble member. Operational research experts call it Multistage Stochastic Programming (MSP).
The key idea of TB-MPC is producing a tree topology from the ensemble data and using this tree in the following optimization. A tree specifies in fact the moments when uncertainties are resolved.
We applied this method for the short term management of Salto Grande reservoir, at the border between Uruguay and Argentina for energy production. Andrea Ficchì, a master student from Politecnico di Milano currently working at Irstea, applied it to a system of four reservoirs on the Seine River, in France. Both cases are under review and will appear in publications soon.
0 comments